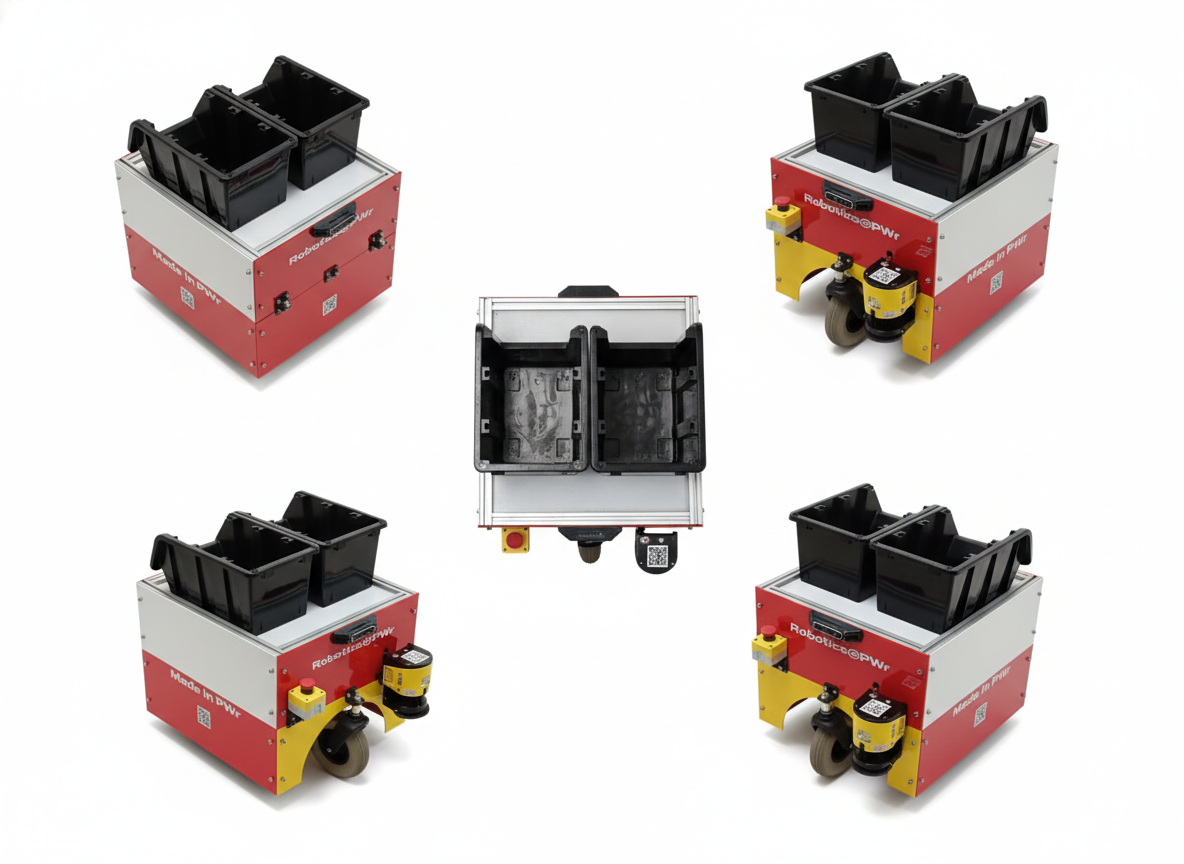

Prezentowany robot to autonomiczna platforma mobilna (AMR) zaprojektowana i zbudowana w ramach działań Robotics@PWr na Politechnice Wrocławskiej. Stanowi demonstrator technologii, służący do rozwoju i testowania rozwiązań z zakresu autonomicznej nawigacji oraz transportu wewnętrznego.
Główne elementy konstrukcyjne i funkcjonalne:
Platforma bazowa: Trójkołowa konstrukcja z napędem różnicowym i pojedynczym kołem samonastawnym z przodu, umożliwiająca manewrowanie w ograniczonych przestrzeniach. Rama wykonana z profili aluminiowych, obudowa z paneli kompozytowych w barwach czerwono-żółtych.
Transport ładunku: Górna platforma wyposażona w dwa dedykowane, pojemniki, co wskazuje na przeznaczenie do przewozu niewielkich ładunków lub komponentów.
Skaner laserowy (LiDAR) SICK: Zamontowany w przedniej części robota element systemu bezpieczeństwa odpowiada za detekcję przeszkód oraz skanowanie otoczenia na potrzeby algorytmów SLAM (Simultaneous Localization and Mapping), stanowiąc kluczowy komponent systemu autonomicznej nawigacji.
Kamera głębi (Intel RealSense): Umieszczona centralnie z przodu, dostarcza danych wizyjnych i informacji o głębi, wspomagając percepcję otoczenia i lokalizację.
Przycisk Stop Awaryjny: Czerwony przycisk awaryjny umieszczony na przedniej ściance, zapewniający możliwość natychmiastowego zatrzymania robota w nagłych sytuacjach.
Przeznaczenie: Platforma ma za zadanie demonstrować możliwości robotów mobilnych w środowisku przemysłowym, służąc jednocześnie jako elastyczne narzędzie do dalszych badań i rozwoju algorytmów robotyki autonomicznej.